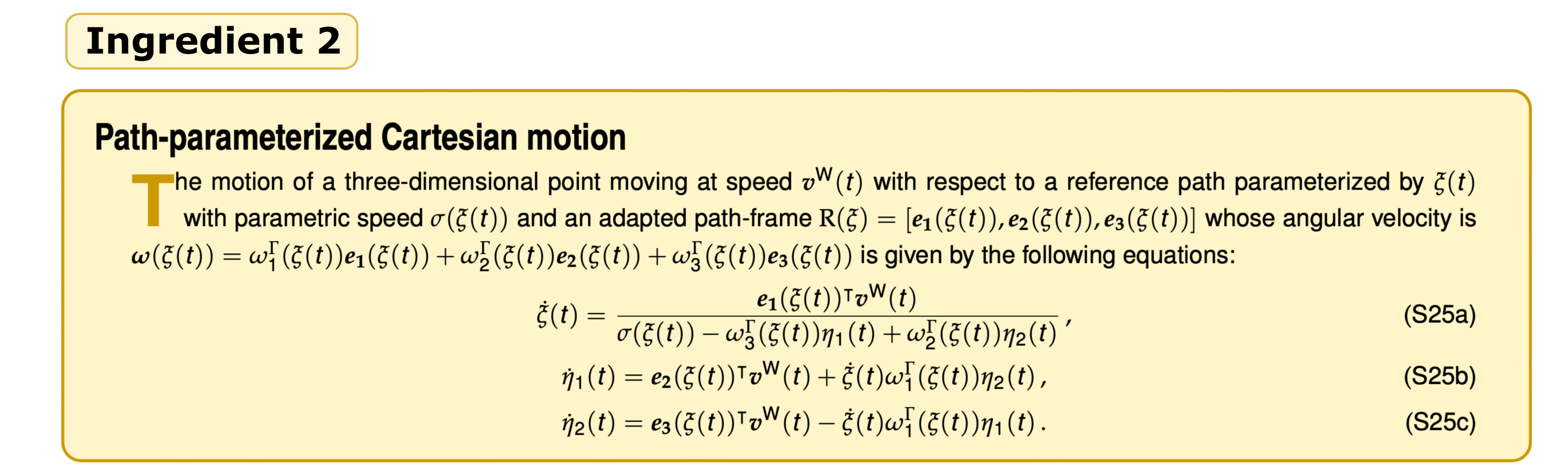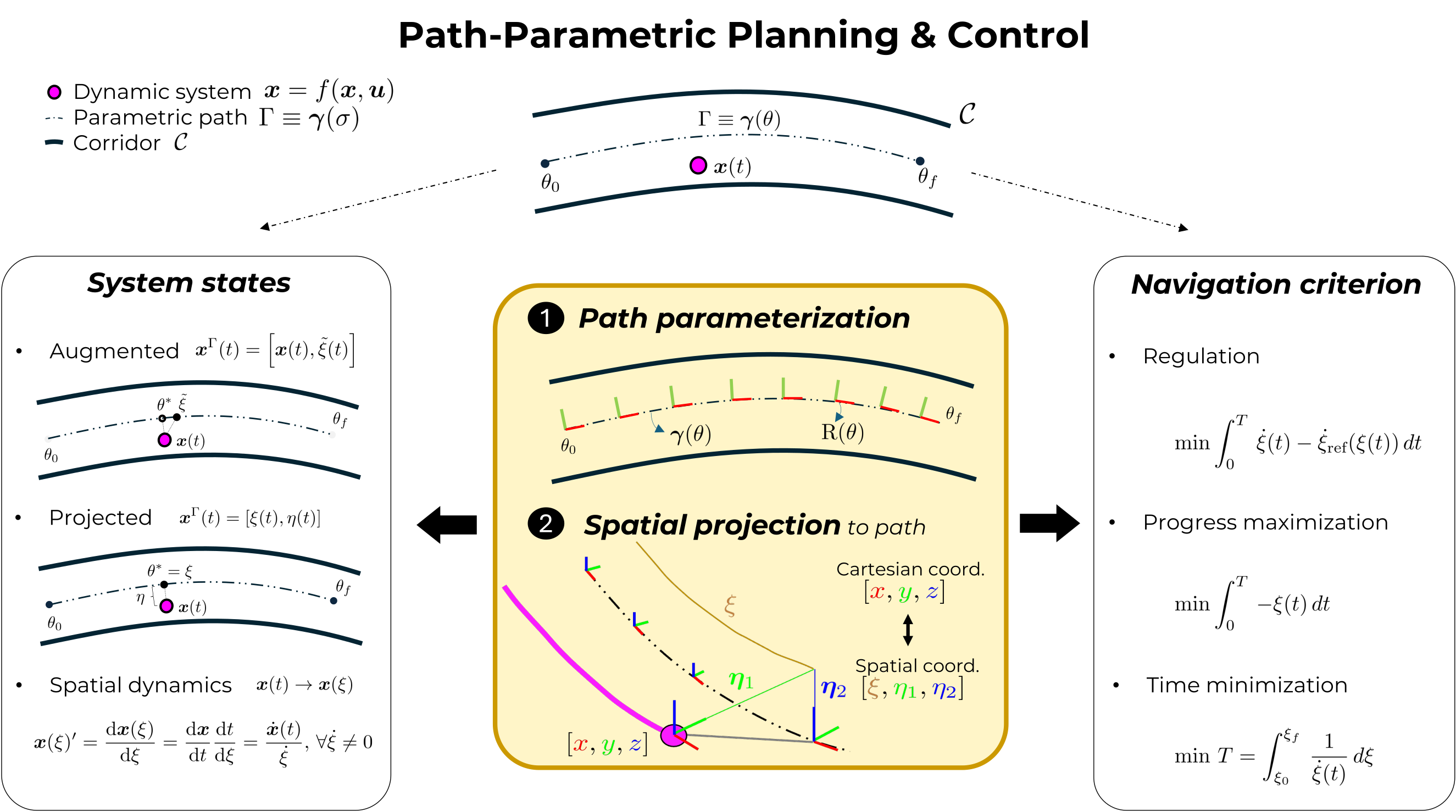
Path-parametric methods rely on a reference path parameterized by an auxiliary variable, σ, to design planning and control algorithms. Due to the wide range of formulations and applications, the literature on parametric methods remains fragmented, with existing approaches often presented in isolation. To unify these methods, we introduce a universal formulation that reveals the underlying connections, and thereby, brings together existing path-parametric techniques in literature. This formulation consists of two main components (shown in the yellow box): (i) a path-parameterization technique for computing moving frames, and (ii) a spatial projection of the Cartesian system dynamics onto the parametric path, formulated without imposing prior assumptions on the moving frame.